- Definizione di sistemi di visione
- L’origine dei sistemi di visione
- Architettura di un sistema di visione:
- PC Based
- Embedded
- Campi di applicazione
- Riconoscimento difetti e rispetto delle tolleranze
- Orientamento, posizionamento e guida robot
- Misure non a contatto
- Verifiche su nastri in continuo (Web Inspection)
- Classificazione e scelta
- Lettura di caratteri e codici
- Perché affidarsi ad un sistema di visione
- Affidabilità dei controlli
- Velocità
- Basso rischio e operatività in ambienti ostili
- Dimensioni degli oggetti da controllare
- Monitoraggio del processo
- Limiti e frontiere tecnologiche
Definizione di sistema di visione
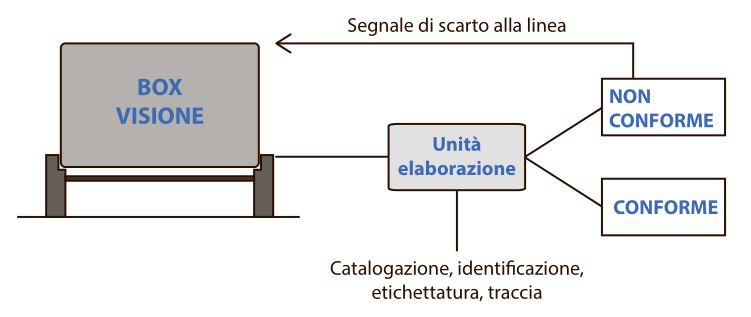
I Sistemi di Visione sono dispositivi costituiti dall’integrazione di dispositivi ottici, elettronici e meccanici che, mediante l’acquisizione e l’elaborazione di immagini, permettono la classificazione automatica degli oggetti. Tale classificazione, risultato dell’elaborazione dei dati acquisiti dal sistema, permette di stabilire se il pezzo esaminato è conforme o meno rispetto una tolleranza dimensionale, un codice identificativo, un parametro qualitativo o quantitativo. Altri parametri di controllo possono essere la completezza del pezzo o l’uniformità di una superficie.
Dalla definizione di sistema di visione sono quindi esclusi tutti i sistemi di pura acquisizione o memorizzazione delle immagini, sia in formato analogico che digitale, che si limitano a “fotografare” un oggetto senza svolgere processi di elaborazione.
Il fine dell’elaborazione e l’output di un segnale: buono/scarto o codice di classificazione. L’informazione acquisita ed elaborata dal sistema deve quindi essere intesa come un elemento in grado di implicare una decisione automatica.

Spesso si parla di visione artificiale come disciplina riferita ai sistemi di visione. Lo scopo principale della visione artificiale è quello di riprodurre la vista umana. Vedere è inteso non come la mera acquisizione di una immagine di una certa area, ma soprattutto come l’interpretazione del contenuto di quell’area. L’informazione è intesa come qualcosa che implica una decisione automatica.
Si devono inoltre distinguere i sistemi di visione dai sistemi di elaborazione di immagine: la visione artificiale comporta necessariamente un’acquisizione fisica dell’immagine, da essa ricava quindi una serie di misure adatte a un controllo automatico. L’elaborazione d’immagine può prescindere, invece, dall’acquisizione dell’immagine ed è intesa come un procedimento atto a produrreuna migliore qualità estetica dell’immagine o una sua migliore leggibilità. Sono operazioni di elaborazione l’aumento di contrasto di una radiografia o l’aumento della saturazione di alcune tonalità di colore.
Origine dei sistemi di visione
La visione artificiale è un’applicazione particolare della più vasta disciplina dell’elaborazione delle immagini.
L’elaborazione delle immagini nasce prima dello sviluppo dell’elettronica come trasformazione ottica delle immagini (1900 circa). Vengono utilizzate le proprietà delle lenti e della luce, in condizioni determinate, per realizzare dei sistemi ottici con particolari caratteristiche; il primo settore di applicazione è stato, quindi, la microscopia.
Questi sistemi sfruttavano la notevole proprietà delle lenti convergenti per ottenere i primi dispositivi di riconoscimento di immagine mediante la correlazione ottica (trasformata di Fourier).
Vennero anche realizzati dei dispositivi a interferometria ottica in grado di misurare deformazioni e verificare la forma di una data superficie, con precisione superiore al micron. Nonostante le enormi potenzialità tale tecnologia non trovò subito applicazione in campo industriale, sia a causa dei costi molto elevati, sia a causa della poca flessibilità costruttiva. Da questo la conseguente difficoltà di integrazione con le linee macchinari di produzione.
L’elaborazione digitale dell’immagine nasce a seguito dell’introduzione del CCD (Charge Coupled Device, Dispositivo a Trasferimento di Carica), cuore delle moderne telecamere, ma per vedere la messa in opera dei primi veri e propri sistemi di visione bisogna guardare al settore militare con i sistemi per il riconoscimento dei bersagli, poi a quello medicale. Si deve inoltre tenere presente che, fino agli anni ’80, le modeste prestazioni di calcolo degli elaboratori elettronici erano insufficienti per trattare in tempo reale immagini anche non molto complesse.
Nel settore industriale si erano invece diffusi alcuni sistemi basati su fotodiodi per attività di selezione o di controllo qualità, prevalentemente nel settore farmaceutico e alimentare. Di interesse e attualità i sistemi per la selezione del caffè, del riso, e di quasi tutti i semi destinati ad utilizzo alimentare.
Negli anni successivi, l’avvento di tecnologie a basso costo per l’acquisizione e l’elaborazione delle immagini, assieme alle accresciute prestazioni dei calcolatori, permettono anche all’industria di disporre di soluzioni tecnologiche basate sull’impiego di telecamere.
Architettura di un sistema di visione
Lo schema descritto nel paragrafo precedente può essere realizzato con architetture hardware e software anche molto diverse fra loro in funzione delle singole esigenze applicative e, in particolare, alle capacità di calcolo richieste al sistema. Si distinguono tuttavia due principali categorie:
– Sistema basato su PC (PC based)
In linea di principio un sistema di visione può essere costituito solamente da un’unità di calcolo (PC) a cui è collegata una scheda di acquisizione delle immagini; d’altro canto non è raro imbattersi in sistemi dalle elevate capacità di calcolo, costituiti da numerose unità di calcolo con processori in parallelo, in grado di acquisire immagini ad alta risoluzione da diverse telecamere contemporaneamente e di elaborare i risultati dell’analisi in pochi millisecondi.
Se l’elaborazione dell’immagine e la successiva classificazione (decisione automatizzata) viene effettuata da una o più unità esterne all’apparato di acquisizione (sistema telecamera – ottica) si parla di sistema PC Based.
I sistemi PC based hanno lo svantaggio di richiedere una postazione/quadro elettrico piuttosto voluminoso, in genere un armadio in grado di ospitare sia il PC che i dispositivi accessori (alimentatori, condizionatori di segnale, gruppo di continuità ecc.); come grande vantaggio offrono invece grandi capacità di calcolo e la possibilità di schierare in parallelo più unità di elaborazione.
– Sistemi Embedded
Per applicazioni non particolarmente complesse sono da qualche anno disponibili sistemi compatti e modulari: le cosiddette “Smart Cameras”, telecamere intelligenti. All’interno del corpo della telecamera, quindi, è presente un sistema operativo in grado di eseguire le operazioni di acquisizione dell’immagine, pre-elaborazione, gestione dei segnali in Input/Output ed encoder. Il vantaggio di tali sistemi è sicuramente l’elevata velocità, infatti i processori integrati alle telecamere presentano un’architettura studiata appositamente per lo svolgimento del loro compito; di contro non offrono le possibilità di personalizzazione di un sistema PC based.
Nella maggior parte dei casi il sistema embedded è privo di interfaccia operatore e per la sua programmazione e configurazione è richiesto l’utilizzo di un PC (portatile in genere), mentre il sistema basato su PC è corredato da una postazione operatore. Quando più sistemi embedded lavorano contemporaneamente è ad essi associata una postazione PC di supervisione.
Campi di applicazione
Riconoscimento difetti e rispetto delle tolleranze
Si tratta di una delle applicazioni più diffuse ed utilizzate, in quanto nessuna produzione industriale può dirsi esente da difetti e gran parte di essi è riscontrabile visivamente. Spesso l’ispezione è condotta da operatori specializzati, con elevati costi per la movimentazione dei pezzi e di risorse umane; l’utilizzo di sistemi di visione permette un’analisi più affidabile e veloce, con un notevole risparmio sui costi e sulla manodopera umana, che viene così sollevata da un compito ripetitivo e oneroso.
Orientamento, posizionamento e guida robot
Una parte significativa dei sistemi di visione si occupa della gestione di sistemi di movimentazione robotizzati o macchine che si muovono nello spazio. In molti casi vengono utilizzati dispositivi con il ruolo di sensore visivo per l’individuazione degli oggetti e la traduzione della loro posizione in un sistema di coordinate, utile per la configurazione del percorso della macchina.
Misure non a contatto
I sistemi di visione sono in grado di realizzare misure ad una o due dimensioni di parametri come diametri, lunghezze, altezze eccentricità, linearità, ma anche a tre dismensioni, come il volume, attraverso l’analisi di immagini acquisite da più angolazioni. L’utilizzo è particolarmente indicato per misurare oggetti fragili, difficili da raggiungere contenuti in altri oggetti, a temperature elevate: ad esempio colate di acciaio fuso in laminatoi, ecc.
Verifiche su nastri in continuo (Web Inspection)
Consiste nella rilevazione di difetti o letture di caratteri su nastri o lastre poste in scorrimento veloce, pereffettuare ad esempio la verifica della correttezza della stampa, l’assenza di difetti su laminati, su tessuti, ecc..
Le dimensioni degli oggetti sono spesso considerevoli e rendono necessario l’impiego di alte risoluzioni, pertanto si tratta di applicazioni specializzate e di alto valore, per le quali vengono utilizzate telecamere lineari con una frequenza di acquisizione molto elevate. L’ispezione produce in output un report con la classificazione del nastro ispezionato in classi di qualità o una localizzazione dei difetti riscontrati.
Lettura di caratteri e codici
Si tratta di funzionalità molto diffuse nei settori alimentare e farmaceutico per eseguire una serie di controlli sui prodotti in uscita su parametri come data di scadenza, lotto di produzione, correttezza dei fogli di istruzione allegati, ecc.
La verifica è stata resa obbligatoria, portando quindi alla nascita di un’intera famiglia di sistemi di visione estremamente specializzati ed ottimizzati per la sola lettura dei codici (alfanumerici, a barre, dot matrix) con un aumento delle prestazioni a fronte di una forte riduzione di prezzo.
Perché affidarsi ad un sistema di visione
Affidabilità dei controlli
Tra i principali vantaggi dati dall’utilizzo di un sistema di visione vi sono, come intuibile, la costanza, la precisione e l’oggettività dei controlli ripetuti. Se adeguatamente mantenuto, un sistema di visione non altera le sue prestazioni nel tempo e non è soggetto a fattori esterni che ne possono minare l’affidabilità. E’ inoltre preferibile l’automatizzazione di un controllo quando i parametri di valutazione sono oggettivi, evitando così errori umani dovuti alla molteplicità degli addetti.
Velocità
Un Sistema di Visione è in grado di svolgere operazioni di verifica in frazioni di secondo anche su oggetti complessi ed in movimento molto veloce, come su nastri trasportatori.
Si generano così due importanti opportunità:
- – E’ possibile ripensare il sistema di controllo qualità passando da verifiche a campione sulla produzione a controlli sul 100% dei prodotti, con tutti i vantaggi che ne conseguono;
- – E’ possibile ridisegnare i processi e le linee di produzione, evitando i polmoni intermedi dedicati ai controlli qualità e al trasferimento dei pezzi da una fase all’altra
Basso rischio e operatività in ambienti ostili
In condizioni ambientali limite come luoghi molto rumorosi, esposti ad agenti chimici, temperature molto elevate o molto fredde, aree nel raggio di azione di macchine o sistemi di movimentazione, spazi ristretti, risulta evidente che un sistema di visione, adeguatamente schermato, può operare in tranquillità senza mettere a rischio la vita dei lavoratori o sottoporli a stress fisici inutili.
Dimensioni degli oggetti da controllare
La dimensione degli oggetti è una variabile che spesso limita la verifica ed il controllo umano nel processo produttivo. I sistemi di visione consentono invece di analizzare particolari non visibili o difficilmente identificabili dall’uomo, sia tramite l’utilizzo di appositi illuminatori, sia tramite l’equipaggiamento con determinate ottiche e lenti.
Monitoraggio del processo
Oltre ad assolvere ai compiti di controllo – ad esempio individuando e scartando pezzi difettosi – i sistemi di visione sono in grado di generare e memorizzare dati sul processo in tempo reale, evidenziando scostamenti dai parametri ottimali e fornendo dati preziosi sull’andamento della produzione. Questo consente di individuare eventuali segnali o trend di peggioramento del processo (derive), aiutando così i responsabili della linea di produzione ad intraprendere azioni correttive in maniera preventiva, con un notevole risparmio in termini economici e di flusso di lavoro.
Limiti e frontiere tecnologiche
Le limitazioni tecnico-applicative sono ancora presenti e rappresentano frontiere di ricerca in fase di sviluppo; in particolare quando l’attività richiesta al sistema è l’interpretazione di forme complesse o tridimensionali: ognuno di noi è in grado di riconoscere centinaia di volti in una frazione di secondo o di trovare un cacciavite a stella in una scatola degli attrezzi molto disordinata.
Il nostro occhio si adatta infatti bene sia a variazioni di luminosità che a cambiamenti della distanza del soggetto, ed è in grado di mantenere l’oggetto che interessa nel campo visivo, concentrandosi sugli aspetti importanti per la funzione che sta svolgendo.
Tutti questi compiti non sono così scontati per un sistema automatico. Ciò accade perché operazioni che il cervello umano è in grado di svolgere in frazioni di secondo richiedono ad un software migliaia di linee di codice che, per essere compilato, necessita di processori molto più potenti di quelli attualmente disponibili.
In generale, i Sistemi di Visione presentano limitazioni quando devono operare con:
- Grandi varietà di pezzi da riconoscere;
- Pezzi di forme molto complesse da ispezionare su più lati;
- Elevato numero di punti di vista (ad esempio, per riscontrare sulla stessa superficie difetti individuabili solo in controluce contemporaneamente a difetti individuabili solo in luce diretta);
- Impossibilità di portare il pezzo all’interno di un campo visivo predeterminato;
- Valutazioni e scelte sulla base di parametri non facilmente codificabili (scelta estetica di materiali naturali).